MindSpore强化学习:使用PPO配合环境HalfCheetah-v2进行训练
扫描二维码随身看资讯
使用手机 二维码应用 扫描右侧二维码,您可以
1. 在手机上细细品读~
2. 分享给您的微信好友或朋友圈~
本文分享自华为云社区《MindSpore强化学习:使用PPO配合环境HalfCheetah-v2进行训练》,作者:irrational。
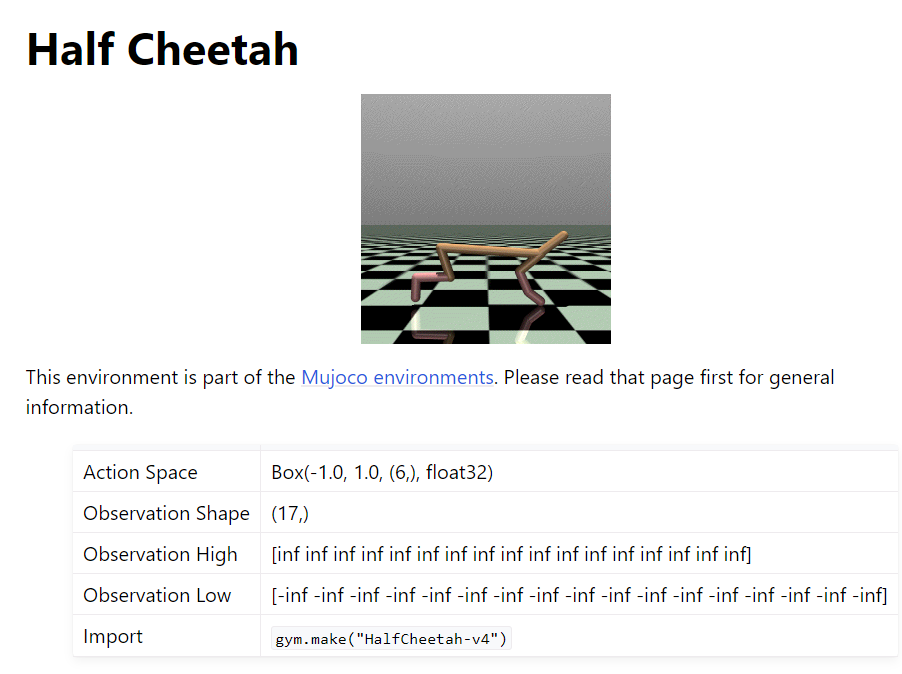
半猎豹(Half Cheetah)是一个基于MuJoCo的强化学习环境,由P. Wawrzyński在“A Cat-Like Robot Real-Time Learning to Run”中提出。这个环境中的半猎豹是一个由9个链接和8个关节组成的2D机器人(包括两个爪子)。在这个环境中,目标是通过施加扭矩在关节上使猎豹尽可能快地向前(向右)奔跑,正向奖励基于前进的距离,而向后移动则会得到负向奖励。猎豹的躯干和头部是固定的,扭矩只能施加在前后大腿、小腿和脚上。
动作空间是一个
Box(-1, 1, (6,), float32)
,其中每个动作代表链接之间的扭矩。观察空间包含猎豹不同身体部位的位置值和速度值,其中所有位置值在前,所有速度值在后。默认情况下,观察不包括猎豹质心x坐标,可以通过在构建时传递
exclude_current_positions_from_observation=False
来包括它。如果包括,观察空间将有18个维度,其中第一个维度代表猎豹质心的x坐标。
奖励分为两部分:向前奖励和控制成本。向前奖励是根据动作前后x坐标的变化计算的,控制成本是为了惩罚猎豹采取过大动作的成本。总奖励是向前奖励减去控制成本。
每个状态的开始是在状态(0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,)上添加噪声以增加随机性。前8个值是位置值,最后9个值是速度值。位置值添加均匀噪声,而初始速度值(全为零)添加标准正态噪声。
当一个剧集的长度超过1000时,该剧集将被截断。
该环境的详细信息可以参考: https://www.gymlibrary.dev/environments/mujoco/half_cheetah/
这个比很多环境都要复杂。
不过没关系,我们有ppo算法,这个算法可以跑强化学习,甚至大语言模型。
PPO(Proximal PolICY Optimization)算法是一种用于强化学习的策略优化方法,它旨在解决传统策略梯度方法(如TRPO,Trust Region Policy Optimization)中的信任区域问题
PPO算法通过引入clipping技巧和重要性采样技巧来减少计算梯度时的方差,从而提高算法的收敛速度和稳定性。
在PPO算法中,有两个关键概念:
- 策略(Policy):策略是一个函数,它定义了在给定状态s时采取动作a的概率分布。
- 价值函数(Value Function):价值函数估计了在给定策略下,从状态s出发,到达某个特定状态或终端时所能获得的期望回报。
PPO算法的主要步骤包括:
- 采样(Sampling):从当前策略中采样数据,包括状态、动作、奖励和下一个状态。
- 计算目标(Calculating Targets):使用目标策略计算目标价值函数,并计算目标策略的KL散度。
- 更新策略(Updating Policy):使用重要性采样技巧和clipping技巧更新策略。
- 更新价值函数(Updating Value Function):使用策略梯度方法更新价值函数。
PPO算法的核心思想是交替更新策略和价值函数,以实现策略和价值的共同优化。这种方法可以有效减少计算梯度时的方差,提高算法的收敛速度和稳定性。
以下是PPO算法的一个简化的Markdown公式:
这个公式是一个简化的版本,实际上PPO算法还包括了许多其他细节和技巧,如经验回放、动态调整学习率等。
第一次编译mujoco会有一点久
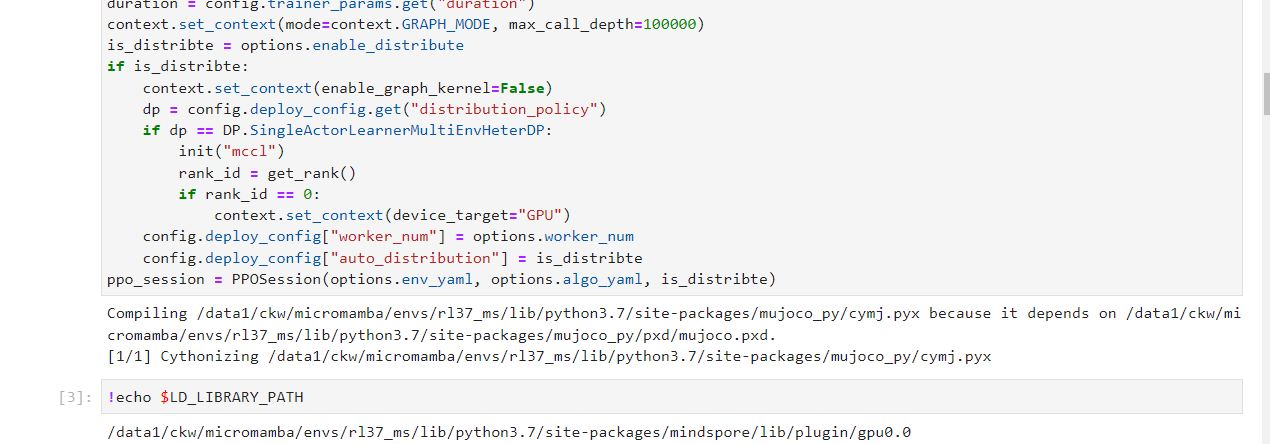
在bashrc加入如下内容:
然后就可以开启训练了。使用上一节的with保留输入。
点击关注,第一时间了解华为云新鲜技术~


































- 1
加查之花 正版
- 2
爪女孩 最新版
- 3
企鹅岛 官方正版中文版
- 4
捕鱼大世界 无限金币版
- 5
球球英雄 手游
- 6
情商天花板 2024最新版
- 7
内蒙打大a真人版
- 8
烦人的村民 手机版
- 9
跳跃之王手游
- 10
蛋仔派对 国服版本
 加查之花 正版
加查之花 正版 爪女孩 最新版
爪女孩 最新版 企鹅岛 官方正版中文版
企鹅岛 官方正版中文版 捕鱼大世界 无限金币版
捕鱼大世界 无限金币版 球球英雄 手游
球球英雄 手游 情商天花板 2024最新版
情商天花板 2024最新版 内蒙打大a真人版
内蒙打大a真人版 烦人的村民 手机版
烦人的村民 手机版 跳跃之王手游
跳跃之王手游 蛋仔派对 国服版本
蛋仔派对 国服版本 黑暗密语2内置作弊菜单 1.0.0 安卓版
黑暗密语2内置作弊菜单 1.0.0 安卓版 驱动事务游戏汉化版 0.3.5 安卓版
驱动事务游戏汉化版 0.3.5 安卓版 地铁跑酷忘忧10.0原神启动 安卓版
地铁跑酷忘忧10.0原神启动 安卓版 猫落家伙最新版 1.4 安卓版
猫落家伙最新版 1.4 安卓版 芭比公主宠物城堡游戏 1.9 安卓版
芭比公主宠物城堡游戏 1.9 安卓版 挂机小铁匠游戏 122 安卓版
挂机小铁匠游戏 122 安卓版 咸鱼大翻身游戏 1.18397 安卓版
咸鱼大翻身游戏 1.18397 安卓版 无尽对决国际服最新版本 1.7.70.8402 安卓版
无尽对决国际服最新版本 1.7.70.8402 安卓版 跨越奔跑大师游戏 0.1 安卓版
跨越奔跑大师游戏 0.1 安卓版 火影忍者云游戏版最新版 4.7.1.3029701 安卓版
火影忍者云游戏版最新版 4.7.1.3029701 安卓版